Dankzij een drukventiel dat lijkt op de opening van een ketchupfles kunnen zachte robots bewegen en reageren op hun omgeving. Deze robots hebben geen elektronica nodig om hun pootjes in een bepaalde volgorde te bewegen.
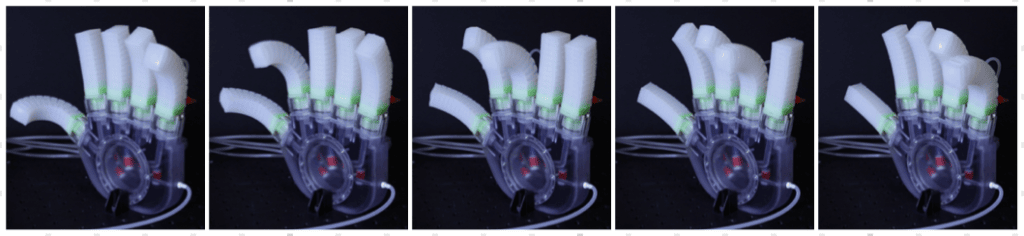
Vijf langwerpige, hoekige robotvingers – gemaakt van een sponsachtig materiaal – krullen soepel een voor een om. Het is alsof de robothand, ontwikkeld door het Amsterdamse onderzoeksinstituut AMOLF, op een onzichtbare tafel trommelt. De zachte, flexibele vingers werken op luchtdruk, en vergen geen elektronica.
Bij robots denk je misschien aan harde, stalen machines die schokkerig bewegen, zoals functionele apparaten in fabrieken of de vriendelijke robots uit films, zoals Wall-E of R2-D2. Maar tegenwoordig werken onderzoekers ook aan robots die net als levende wezens zacht zijn en die soepel en reflexmatig reageren op hun omgeving. Dit is nodig om robots veilig te laten werken met en voor mensen, bijvoorbeeld in de zorg.

‘AI is een veredelde rekenmachine’
Met AI spoort Ann Dooms vervalste schilderijen op, maakt ze onleesbare teksten doorzoekbaar en brengt ze de kwaliteit van eicellen in kaart.
Ketchupfles
AMOLF-onderzoekers presenteren in hun nieuwste onderzoeksartikel een zachte robot die werkt op luchtdruk. Zonder dat er elektronica bij te pas komt, kan hij lopen en van ritme veranderen in reactie op de omgeving.
Om dit voor elkaar te krijgen, gebruiken de robots een drukventiel waarvan het ontwerp lijkt op de opening van een ketchupfles. Als je de ketchupfles ondersteboven houdt dan is dit ventielklepje dicht. Pas als je hard genoeg in de fles knijpt, gaat het klepje open en komt er ketchup uit.
Als je te hard in een fles knijpt, dan kan de ketchup gaan sputteren doordat de opening snel open en dicht klappert. ‘Dit verschijnsel zag ik een paar jaar geleden’, zegt AMOLF-natuurkundige Bas Overvelde. ‘Toen dacht ik ‘dit is interessant’.’
Onlangs probeerde het team voor de lol de ketchupexperimenten in het lab te herhalen. Maar dat bleek niet gemakkelijk. Overvelde: ‘Het blijkt dat ze het ontwerp van de dop hebben aangepast waardoor het minder sputtert. Maar voor ons is juist dat normaal gesproken ongewenste gedrag interessant.’
Ritmisch bewegen
De onderzoekers maakten een eigen ventielopening van siliconenrubber waar ze kleine inkepingen in sneden. Dit sloten ze aan op een pomp, een soort ballon en een zachte robotvinger.
De ballon blazen ze met de pomp op. Als de druk daarin hoog genoeg is, dan gaat de ventielklep naar de robotvinger open, waardoor de vinger beweegt.
‘Toen we twee robotvingers met ventielen aansloten op een ballon gebeurde er iets onverwachts’, zegt teamlid Luuk van Laake. ‘De vingers bewegen dan precies om en om.’
Dit komt doordat de ene klep, die bij een iets lagere druk reageert, eerst opent. Daardoor daalt de druk in de ballon zodat de tweede ventielklep niet kan openen. Als de druk vervolgens weer opbouwt, gaat de eerste klep niet opnieuw open, omdat de vinger nog een beetje gebogen is. De eerste klep heeft als het ware onthouden dat hij net open is geweest en slaat een beurt over. Daardoor krijgt de tweede klep een kans om open te gaan en beweegt de tweede vinger.
Door dit effect ontstaat een ritme waarbij de ene na de andere vinger beweegt. Dit werkt ook met vier of vijf zachte robotvingers. Zo kun je een zachte robothand ritmisch laten trommelen.
Lopende robot en kunsthart
Die afwisselende beweging zie je ook bij natuurlijke bewegingen, zoals lopende wezens. Zo kon een zachte robot met vier luchtdrukpootjes dankzij dit ritme vanzelf lopen, zonder aansturing van buitenaf.
Het ritme past zich aan als de omgeving verandert. Als de onderzoekers kort een van de luchtslangetjes afsloten, dan schakelde de robothand bijvoorbeeld over naar een ander trommelritme. Volgens dit principe zou een lopende zachte robot in de toekomst zelf van loopritme kunnen veranderen als hij sneller gaat of wanneer hij een obstakel tegenkomt.
De onderzoekers denken ook al verder. Van Laake: ‘Zachte robotica staat nog aan het begin van zijn ontwikkeling. We werken nu aan onderdelen die steeds langer meegaan en steeds efficiënter zijn, omdat we denken aan toepassingen in het menselijk lichaam, zoals een kunsthart.’ Het doel is daarbij om een zacht kunsthart te laten kloppen zonder complexe, harde elektronica.