
Een nieuwe robothuid is zo gevoelig dat het een lopend lieveheersbeestje of een enkele vallende druppel registreert. Net zoals de menselijke huid ‘voelen’ de elektrische sensoren in het materiaal niet alleen druk, maar ook wrijving en draaiende bewegingen.
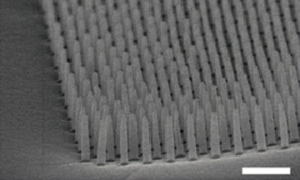
Een elektronische robothuid, ontwikkeld op de nationale universiteit van Seoul, registreert extreem lichte aanrakingen. De ‘huid’ bestaat uit twee flexibele platen vol met minuscule haartjes gemaakt van een polymeer. De haartjes zijn 100 nanometer breed en een micrometer lang, en geleiden elektriciteit dankzij een dun laagje metaal. De twee platen worden op elkaar drukt, zodat de haartjes in elkaar schuiven. Elektrische sensoren meten vervolgens iedere mogelijke beweging van de haartjes. Het onderzoek is gepubliceerd in het vakblad Nature Materials.

AI-assistent kan 113-hulpverlening ondersteunen
Dataspecialist Salim Salmi maakte een AI-tool die 113-hulpverleners ondersteunt.
Het ontwerp is gebaseerd op de vleugels van kevers. Sommige keversoorten vouwen hun vleugels na gebruik dicht op hun rug. Daarbij vouwen kevers laagjes met microhaartjes in elkaar. Een deel daarvan zit op de vleugels zelf, een deel op hun rug. ‘Die haartjes zorgen voor een boel wrijving, zodat de vleugels goed vastzitten en niet rondschuiven’, e-mailt biomechanisch technoloog Changhyun Pang, een van de Koreaanse onderzoekers. Die biologische truc leek hem uitstekend voor een gevoelige sensor, omdat alle in elkaar gevouwen haartjes samen een enorm contactoppervlak voor bewegingregistratie vormen.
Pang en zijn collega’s willen de gevoelige sensoren niet alleen introduceren in de robotindustrie, maar denken ook aan het oppervlak van touchpads. Pang: ‘Onze groep is daarnaast in gesprek met een bedrijf in de gezondheidszorg dat het materiaal kan gebruiken voor gevoelige hartmonitors.’
Maud Etman
Afbeelding: Pang, C. et al. Nature Materials.